




Распиновка arduino nano
GPIO
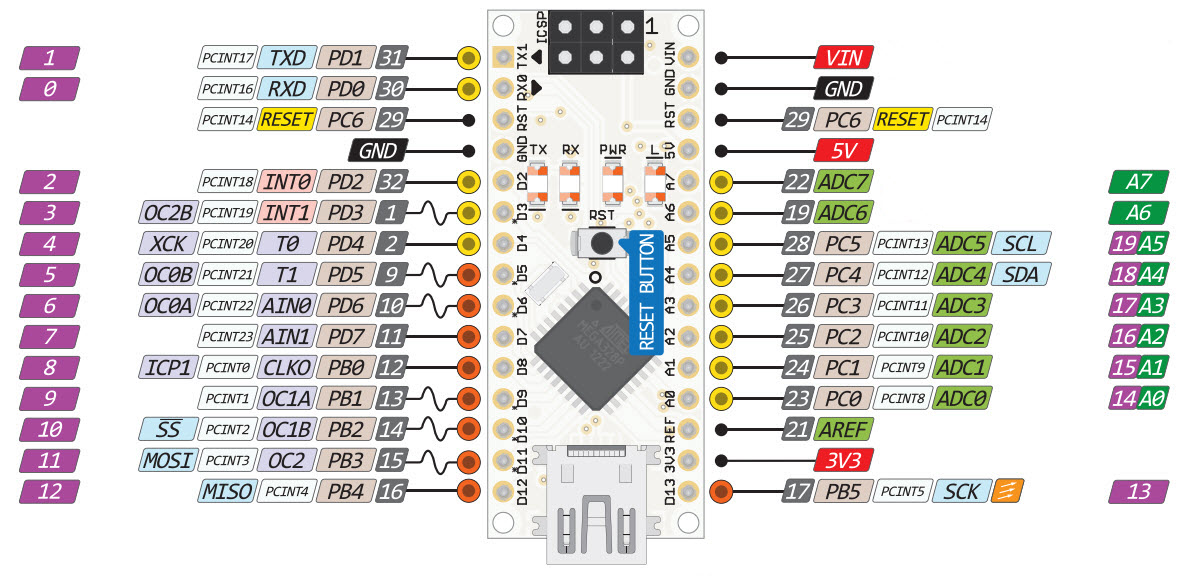
Начнем с пинов, которых больше всего, это GPIO, с англ. General Purpose Input-Output, входы-выходы общего назначения, на плате они подписаны как D0–D13 и A0–A5. По картинке распиновки они называются PD*, PB* и PC*, (вместо звёздочки – цифра) отмечены тёмно-бежевым цветом. Почему “официально” они называются PD/PB/PC? Потому что пины объединены в пОрты по несколько штук (не более 8), на примере Нано есть три порта: D, B и C, соответственно пины так и подписаны: PD3 – Port D 3 – третий выход порта D. Это цифровые пины, способные выдавать логический сигнал (0 или VCC) и считывать такой же логический сигнал. VCC это напряжение питания микроконтроллера, при обычном использовании обычной платы Ардуино это 5 Вольт, соответственно это 5 вольтовая логика: 0V – сигнал низкого уровня (LOW), 5V – высокого уровня (HIGH). Напряжение питания микроконтроллера играет очень большую роль, об этом мы ещё поговорим. GPIO имеют несколько режимов работы: вход (INPUT), выход (OUTPUT) и вход с подтяжкой к питанию встроенным в МК резистором на 20 кОм (INPUT_PULLUP). Подробнее о режимах поговорим в отдельном уроке.
Все GPIO пины в режиме входа могут принять сигнал с напряжением от 0 до 5 вольт (на самом деле до 5.5 вольт, согласно даташиту на микроконтроллер). Отрицательное напряжение или напряжение, превышающее 5.5 Вольт приведёт к выходу пина или даже самого МК из строя. Напряжение 0-2.5 вольта считается низким уровнем (LOW), 2.5-5.5 – высоким уровнем (HIGH). Если GPIO никуда не подключен, т.е. “висит в воздухе”, он принимает случайное напряжение, возникающее из за наводок от сети (провода 220в в стенах) и электромагнитных волн на разных частотах, которыми пронизан современный мир.
GPIO в режиме выхода (OUTPUT) являются транзисторными выходами микроконтроллера и могут выдать напряжение 0 или VCC (напряжение питания МК). Стоит отметить, что микроконтроллер – логическое, а не силовое устройство, его выходы рассчитаны на подачу сигналов другим железкам, а не на прямое их питание. Максимальный ток, который можно снять с GPIO выхода ардуино – 40 мА. Если попытаться снять больше – пин выйдет из строя (выгорит выходной транзистор и всё). Что такое 40 мА? Обычный 5мм одноцветный светодиод потребляет 20 мА, и это практически единственное, что можно питать напрямую от Ардуино. Также не стоит забывать о максимальном токе со всех пинов, он ограничен 200 мА, то есть не более 10 светодиодов можно запитать от платы на полную яркость…
Интерфейсы
Большинство GPIO имеют дополнительные возможности, так как к ним подключены выводы с других систем микроконтроллера, с ними вы уже знакомы из предыдущего урока:
- ADC (АЦП, аналогово-цифровой преобразователь) – зелёные подписи ADC* на распиновке
- UART (интерфейс связи) – голубые TXD и RXD на распиновке
- Выводы таймеров, они же ШИМ пины – светло-фиолетовые OC*A и OC*B, где * номер таймера
- SPI (интерфейс связи) – голубые SS, MOSI, MISO, SCK
- I2C (интерфейс связи) – голубые SDA и SCL
- INT (аппаратные прерывания) – розовые INT0 и INT1, а также PCINT* – PinChangeInterrupt
Если про интерфейсы мы уже говорили, то АЦП, прерывания и выводы таймеров ещё не затрагивали.
АЦП
ADC пины (с АЦП) помечены на плате буквой A. Да, пины A6 и A7 на плате Нано имеют только вход на АЦП и не являются GPIO пинами! АЦП – аналогово-цифровой преобразователь, позволяет измерять напряжение от 0 до VCC (напряжения питания МК) или опорного напряжения. На большинстве плат Ардуино разрядность АЦП составляет 10 бит (2^10 = 1024), что означает следующее: напряжение от 0 до опорного преобразуется в цифровую величину от 0 до 1023 (1024-1 так как отсчёт идёт с нуля). Опорное напряжение играет очень большую роль: при опорных 5V один шаг измерения АЦП составит 4.9 милливольта (0.00488 В), а при опорных 1.1В – 1.1 мВ (0.00107 В). Вся суть в точности, я думаю вы поняли. Если опорное напряжение установлено ниже напряжения питания МК, то оцифровывая напряжение выше опорного мы получим 1023. Подавая на АЦП напряжение выше 5.5 Вольт получим выгоревший порт. Подавать отрицательное напряжение также не рекомендуется. На ардуино есть несколько режимов опорного напряжения: оно может быть равно VCC (напряжению питания), 1.1V (от встроенного в МК стабилизатора) или получать значение с внешнего источника в пин Aref, таким образом можно настроить нужный диапазон и получить нужную точность. У других моделей Ардуино (например у Меги) есть и другие встроенные режимы. Опорное напряжение рекомендуется заводить на плату через резистор, например на 1 кОм. Для измерения напряжений выше 5.5 вольт необходимо использовать делитель напряжения на резисторах.
Таймеры (ШИМ)
Выводы таймеров: в микроконтроллере, помимо обычного вычислительного ядра, с которым мы работаем, находятся также “хардварные” счётчики, работающие параллельно со всем остальным железом. Эти счётчики также называют таймерами, хотя к таймерам они не имеют никакого отношения: счётчики буквально считают количество тиков, которые делает кварцевый генератор, задающий частоту работы для всей системы. Зная частоту генератора (обычно 16 МГц) можно с очень высокой точностью определять интервалы времени и делать что-то на этой основе. Какой нам прок от этих счётчиков? “Из коробки” под названием Arduino IDE мы имеем несколько готовых, основанных на таймерах инструментов (функции времени, задержек, измерения длин импульсов и другие).
В этой статье речь идёт о пинах и выходах, о них и поговорим: у каждого счётчика есть два выхода на GPIO. У нано (у МК ATmega328p) три счётчика, соответственно 6 выходов. Одной из возможностей счётчиков является генерация ШИМ сигнала, который и выводится на соответствующие GPIO. Для нано это D пины 5 и 6 (счётчик 0), 9 и 10 (таймер 1) и 3 и 11 (таймер 2). ШИМ сигналу посвящен отдельный урок, сейчас просто запомним, что с его помощью можно управлять яркостью светодиодов, скоростью вращения моторчиков, мощностью нагрева спиралей и многим другим. Но нужно помнить, что ограничение по току в 40 мА никуда не делось и питать от пинов ничего мощнее светодиодов нельзя.
Прерывания
Аппаратные прерывания позволяют процессору мгновенно переключаться на некий блок действий (функция обработчик прерывания) при изменении уровня сигнала на пине. Подробнее об этом, а также о PinChangeInterrupts поговорим в другом уроке.
Другие пины
- Пин 3.3V может быть использован для питания маломощных датчиков и модулей: максимальный ток, который можно снять с пина 3.3V составляет 150 мА, что с головой хватает для любых датчиков и модулей, кроме пожалуй радиомодулей nrf25L01.
- Пины GND – земля питания, все GND связаны между собой
- Пин 5V – питание от источника с напряжением до 5.5V (подробнее о питании смотри в следующем уроке)
- Пин Vin – питание от источника с напряжением 7-15V (подробнее о питании смотри в следующем уроке)
- RST – перезагрузка МК. Также этот пин выведен на кнопку
Материалы взяты с сайта: alexgyver.ru/
Аналоговые и цифровые порты
Аналоговый сигнал непрерывно изменяется во времени. Вся информация в природе аналоговая — волны на воде, колебание струны и т.д. Изначально человек записывал информацию (звуки, изображения, видео) с помощью аналоговых устройств. Но аналоговые сигналы чувствительны к воздействию шумов и помех.
Цифровой сигнал передается в виде единиц и нулей, для компьютеров и цифровой техники это проще реализовать (есть сигнал или нет сигнала). Для оперативной памяти в компьютерах используют конденсаторы, один заряженный конденсатор — 1 бит. На флеш-памяти используют транзисторы с плавающим затвором.
С появлением компьютеров аналоговые сигналы стали переводить в цифру, поскольку аналоговый сигнал подвержен искажениям и затуханию при передаче или записи. Наглядно продемонстрировать разницу между аналоговым и цифровым сигналом поможет картинка, где изображен процесс квантования — разбиение непрерывной величины на конечное число интервалов (перевод аналогового сигнала в цифру).
Другими словами
Получается что аналоговым сигналом можно передать и принимать диапозон значений а вот цифровым только да / нет (HIGHT/LOW). Отправляются данные командой DigitalWrite, Принимаются DigitalRead.
Что же касается аналогового то тут можно получить данные от 0 до 1023 и передать данные от 0 до 255. Отправляются данные командой AnalogWrite, Принимаются AnalogRead.
AnalogWrite работает только на пинах 3,5,6,9,10,11, на картинке распиновки в начале статьи они показаны кривой линией которая отходит от платы к пояснению пина.